
体がやわらかいと困ることもある。
硬くて尖ったものに触れると傷つきやすい。ぐにゃぐにゃしていると重いものを支えられない。やわらかさも硬さも、同じくらい大事だ。例えば、カタツムリは、やわらかい足とかたい殻を両方備えている。人間の体も、やわらかい組織とかたい骨の組み合わせだ。
柔らかさも硬さも必要というなら、その両方を備えた素材があったら便利ではないだろうか?
いくつか、それを実現する技術がある。
最近になってロボットへの応用が進んでいるのはジャミング(granular jamming)という物理現象だ。普段はさらさらしている小麦粉を計量スプーンにぎゅうぎゅうに詰めると、傾けても落ちないくらい固くなる。その現象だ。実用的には、粉や粒を袋に入れ、その中の空気を抜くことで押し固める。
ジャミングの最初のロボット応用は、2000年頃に日本で行われたようだ。
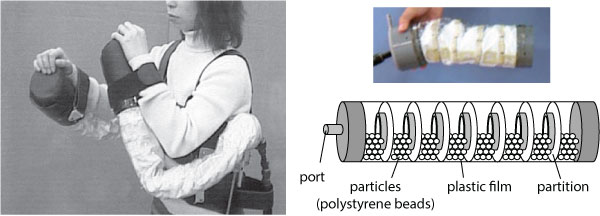
立命館大学の生体ロボット研究室で開発された「粒子内蔵型機械拘束要素(PMC: Particle Mechanical Constraint)」は、ジャミングとは呼ばれていないが、発泡スチロール・ビーズのジャミング現象を利用した先駆的な研究である。ビーズを入れた袋から空気を抜くことで、曲げるときの固さが変わる。筒状だけでなく、板状、ドーナツ状のPMCも試作された。
iRobotと、Jaegar Labの共同研究で生まれ、2009年に発表されたJamBotは、アメーバのような移動を目指したロボットだ。やわらかい正20面体で、それぞれの正三角形タイルがジャミングで固さを変える。やわらかい部分だけ膨らんで突き出るので、転がることができる。

Creative Machines Labと、Jaeger Lab、iRobotは、共同研究でジャミングをロボット・グリッパーに応用した。ジャミング可能な(jammable)素材は、密度を増して固くなるときに少しだけ縮む。そうすると、やわらかくなじむだけでなく、包んだ物体との摩擦が大きくなって持ち上げられるのだ。

このようなジャミング・グリッパーは、実は、風船にコーヒーの粉を詰めるだけで簡単に作ることができる。Web上で、いくつか手作りした例が見つかる。
ジャミングを利用して、ゾウの鼻のようなロボットも作られている。ワイヤで引っ張って曲げているのだが、同じワイヤを引いても、それぞれの節を固くするかやわらかくするかで曲がる場所が変わる。関節の場所を動的に変えられるというわけだ。

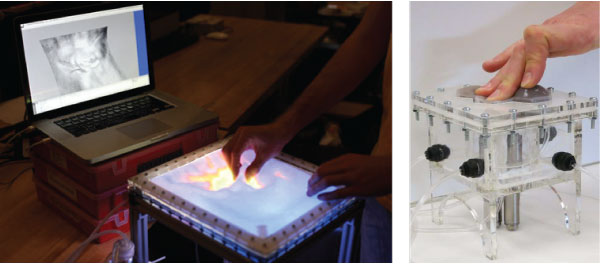
やわらかさが変わるということは、触り心地も変わるということだ。コンピュータの画面は何を表示しても固い板だが、ジャミングを使えば、ものの固さを伝えられるディスプレイができるかもしれない。また、形をつくるときはやわらかく、気に入った形になったら固定できるような粘土ができるかもしれない。そういった、ジャミング素材のコンピュータ・インタフェースへの応用も試されている。
さて、ジャミングを使った研究ばかり紹介してきたが、他にも方法はある。
例えば、低融点合金を使えば、骨のあるロボットをタコのようにやわらかくできるだろう。水を凍らせてもよい。ただし、物質の相転移を利用すると変化に時間がかかる。他にも、磁気粘性流体(MR Fluid)のような、電気的にコントロールできる機能性流体も使えるかもしれない。
ジャミングにも欠点はたくさんある。コントロールにポンプやバルブが必要なこと。袋で包まなければならないので、変形の自由度が限られること。それに、固くなるといってもコーヒーの粉を押し固めた程度の固さにしかならないから、厚みがないと折れ曲がってしまう。
ハードとソフトの間を自由に行き来するような素材を作り出すことは、まだまだ科学と工学の課題のひとつだ。
