
いろいろなソフト・ロボットを眺めていると気づくことがある。
タコの足に代表されるような、グネグネした細長いものが多いことだ。
ソフト・ロボティクスは、触手(tentacle)を作るのが得意である。
骨がない、ゾウの鼻(trunk)、あるいは舌(tongue)のようなものは、やわらかいもので作るのが自然だ。
硬い部品の組み合わせでは、弾性変形や、なめらかな表面を再現することは難しい。
一方で、ソフト・ロボティクスならではの機構が触手の他にあまりない現状、も見えてくる。
触手状のソフト・ロボットをいろいろ見てみよう。
早い時期の名作としては、鈴森康一博士(東芝総合研究所、岡山大学を経て、現東工大)が提案したFlexible Microactuator (FMA)がある。生きているような、なめらかな動きや、4本のFMAでナットを回すデモはインパクトがある。FMAは、第1報の日本語論文が1989年発表、英語論文の発表は少し遅れて1991年頃である。
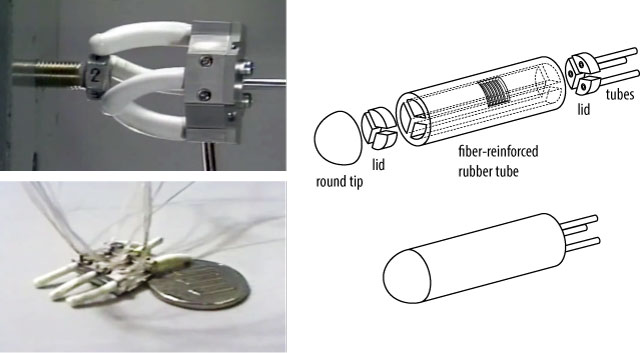
FMAは空気圧で変形する中空のチューブで、その中は仕切りで3つに分かれている。シリコンラバー製のチューブには、周方向にぐるぐると巻かれた繊維が埋め込まれている。そのおかげで、ただの風船とちがって、太さ方向にはふくらまないが、長さ方向には伸びる。3つの空気室のうち、例えばひとつ空気室の圧力を上げると、偏った膨張によってFMAは曲がる。空気室すべての圧力をあげると、FMAは曲がらずに伸びる。
FMAより早い時期に、ヘビ型ロボットで知られる東京工業大学の広瀬茂男博士らは、形状記憶合金(SMA: Shape Memory Alloy)で動くアクティブ内視鏡(active endoscope)を開発した。この内視鏡はしなやかな多節構造になっているので複雑な曲線を作れる。それぞれの節が、SMAコイルの縮む力で曲がる。制御の難しいSMAの熱処理条件や状態変化を詳しく調べ、抵抗値フィードバックによるサーボ制御を実現したところがすばらしい。広瀬らは、ヘビのような触手のような機械を、ACM (Active Code Mechanism)と呼んでいる。
![Elastorの動き(左、「東工大名誉教授 広瀬茂男 ロボット・ギャラリー」より)、そのメカニズム(右、[広瀬ら, 1983]より)](https://elasticmindblog.com/wp-content/uploads/2014/09/hirose_elastor_activeendoscope2.jpg)
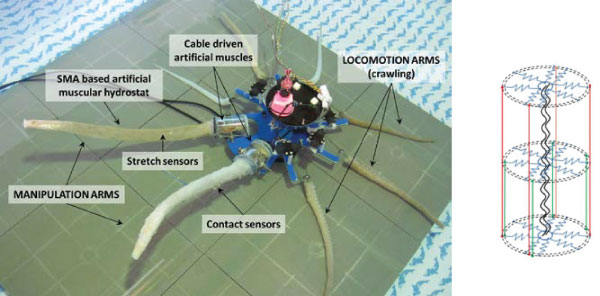
最近の代表的な触手は、2009年から2013年にかけて行なわれたOCTOPUSプロジェクトのタコ足である。この触手の特長は、先行研究とちがって、曲がるだけでなく、触手が太くなったり細くなったりして伸び縮みすることだ。これは、形状記憶合金(SMA)ワイヤが、縦にも横にも入っていることで実現されている。できあがったタコ型ロボットは、物を握るのにも移動にも触手を使う。ただし、移動用の触手はただの触手型ラバーで、根元から振っているだけだ。
最後に、ハーバード大学(Harvard University)のWhitesides Research Groupで開発された触手をいくつか紹介する。ひとつは、空気室を内蔵した棒状のシリコンラバーに、少し固めの芯を入れたものだ。空気を入れるとコイル状に変形して、軽いものをからめて支えることができる。
![やわらかいロボット触手(左、[Martinez et al., 2013]より)、ピアノの鍵盤を押す触手(右、[Mosadegh et al., 2013])](https://elasticmindblog.com/wp-content/uploads/2014/09/whitesides_robotic-tentacles.jpg)
触手状のソフト・ロボットをいくつか紹介した。
触手のような構造は、指や脚として使えるだけでなく、細く狭い場所の検査・探査という応用がある。ただし、骨のない構造だから、あまり大きな力は出せない。約30年間の研究を経ても、駆動方法はワイヤ、空気圧、SMAに限られていることがわかる。
ヘビ、ミミズ、イモムシのように、移動するぐねぐねした細長いロボットもたくさんあるが、それはまた次回以降に取り上げよう。

1件のコメント