
ロボット新時代の夜明け
ソフトロボティクス(soft robotics)は、やわらかいロボットをあつかう新しい研究分野だ。
「ソフト」はソフトネス(softness:柔軟性)のことで、コンピュータソフトウェアのソフトではない。ロボットの、見てさわれる物質的な部分、ハードウェアをやわらかくする試みである。
やわらかいロボットとわざわざ言うのは、今のロボットがかたいからだ。かたいロボットの代表は、工場で働く産業用ロボットで、すでに世界で約160万台以上が稼働している。
かたいロボットは、自動車や電気製品の工場で活躍しているが、人間にしかできない作業はまだまだ多い。弁当を詰めることも、植木を剪定することも、子どもと遊ぶことも、今のロボットには難しい。できないことが多すぎる。
ロボット研究者は、次のロボティクスについて考えはじめている。未来のロボットはどんなものになるのか?その問いに答えるために、いま試されているのがソフトロボティクスなのである。
やわらかさと安心
ロボットがやわらかくなるとなにができるだろうか?
まず、ロボットがより安全になる。ロボットの表面がやわらかければ、ぶつかっても痛くない。ロボットの関節がやわらかければ、人間の力で動きを止められる。
人間同士で、なぜ握手やハグが可能か?やわらかいからだ。やわらかさは安心である。
ディズニーの映画『ベイマックス(Big Hero 6)』はこれをうまく表現している。ベイマックスはヘルスケアロボットで、人間とやわらかくハグができ、高いところから落ちても壊れない。

産業用ロボットは、強くて、精確で、そして危険だ。工場の中で、ロボットは猛獣のように柵に囲われている。握手なんてとんでもない。
いまの産業用ロボットのトレンドは、柵なしに人間と一緒に働ける、力の弱いロボットである。臨機応変に動けないロボットは、融通が利く人間と一緒に働く方が、できることが増えるのだ。
人間とロボットが接近しつつある。機械と人間がゼロ距離のウェアラブルデバイスもある。人間と物理的に接するロボットにはやわらかさが必要だ。
やわらかさと適応
もしも骨だけのガイコツ人間になったとすると、全身の表面が硬い。そうなると、指先で卵をそっと持ち上げることも、転んで尻もちをついて平気でいることも、静かに歩くことも、ぜんぶ極端に難しくなる。
やわらかい肉は、とても機能的だ。例えばドアノブを握ったとき、指と手のひらは変形して曲面にぴったり沿う。指先に埋めこまれた触覚で、どれくらい密着しているか、どれくらい滑っているかわかる。
やわらかい変形を利用して、なんでも持てるロボットハンドが発明されている。押しつけて変形した後に空気を抜くと形を保ったまま硬くなる「ジャミング現象」を利用している。挟むでも吸いつけるでもない、第3の原理だ。
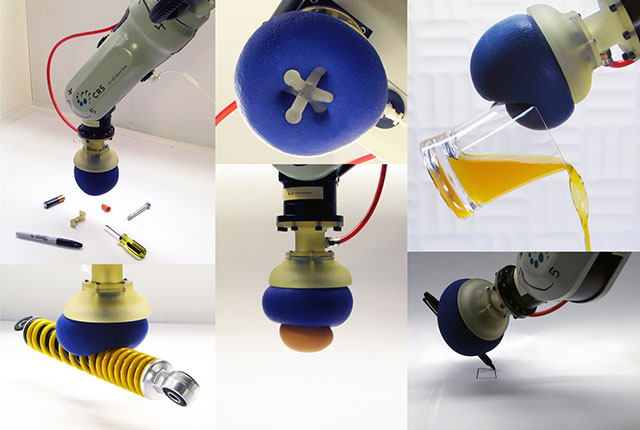
かたいロボットハンドで物をつまみあげようと思ったら、形をよく見て、持ち方を計算しなければいけない。やわらかいロボットハンドは、発想を大きく変えて、自動的に起こるやわらかい変形をうまく利用している。
サイエンスのためのソフトロボット
「役に立つ」ロボットのあり方は、ものを運んだり機械を組み立てたりすることに限らない。
ちょっとまわりくどいように思えるかもしれないが、生物を知るために生物とそっくりのロボットを作るというアプローチがある。やわらかさは、生物らしさと深く関係している。生物の体の材料が、水と有機化合物という、柔軟材料だからだ。生物の仕組みを再現するにはソフトロボティクスが必要だ。
ある生物を調べるとき、解剖するだけではわからないこともある。特に動きはそうだ。観察で得られた仮説を確かめるために、ロボットを実際に這わせたり泳がせたりすることができる。
例えば、イタリア・聖アンナ大学院大学(Scuola Superiore Sant’Anna)のCecilia Laschi博士が率いて2009年から2013年にかけて行なわれたOCTOPUSプロジェクトは、名前通りタコに学んだ巧みでやわらかいロボットを作る研究プロジェクトだ:
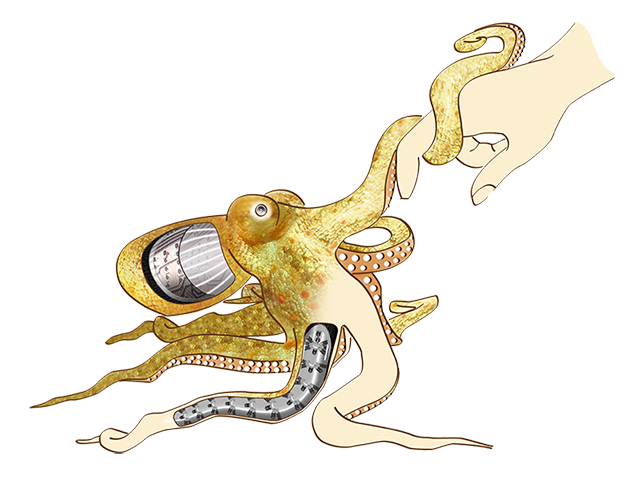
「作ることで知る」方法は、生物学とロボティクスの共同作業だ。タコ型ロボットの研究では、どんな筋繊維の配置がやわらかい触手を実現しているのか、触手の制御にはどんな神経基盤があるのか、などを調べるプラットフォームになる。
ロボットを使う生物学は、生物に学ぶロボットと表裏一体で、今までにないロボットを作ることにもつながる。
そして未来
大げさにいえば、ソフトロボティクスは「ロボット=金属機械」という既成概念を変える力をもっている。
ロボットを作ることは、現在、エンジニアの仕事とされている。金属を削って、ネジを締めて、電子回路をつなげて、プログラムを書く、そういう作業だ。
やわらかいロボットは、機械工学の枠組みから逸脱している。変形する高分子材料や、生きた細胞などがロボットの材料になる。組み立ては不要になって直接3Dプリンタで出力することに取って代わられるかもしれない。そして、ロボットのプログラミングは、バイオハックと同義になるかもしれない。
ソフトロボティクスは、生体親和性の高い人工物を作る道である。人工筋肉で動く義手・義足や、人工臓器の3Dバイオプリンティングが、その延長線上にある。
生きた材料を使うバイオプリンティングは、発展途上の技術である。例えば、ハーバード大学のJennifer Lewis博士らは、腎臓の尿細管に似せた構造をプリントし、生きた細胞を住まわせた:

生物がもつ自己複製や自己修復の機能が、いずれロボットにも取り入れられるかもしれない。いまはまだ実現していないが、傷ついても治るロボットや、成長するロボットが現れるだろう。
ソフトロボティクス元年
ソフトロボティクスという言葉が、いまのような意味で使われ、広く認識され始めたのが2010年頃のことである。そこで、2010年を「ソフロボティクス元年」と位置付けてみよう。
ソフトロボティクスが盛り上がっているのは、ロボット研究者だけが騒いでいるからではない、他の分野の研究者が、どんどん参入しているからだ。生物学、化学、材料科学、計算幾科学、…関わりのある学術分野は幅広い。
やわらかいロボットが当たり前になり、「ソフト」ロボティクスとわざわざ言わなくてもすむまで、研究は続くだろう。
これは「はじまり」である。
文責:新山龍馬(ロボット博士)
