
組み立てないロボット作り
軟体ロボットのボディーは柔軟材料で作られている。やわらかい体が変形することで、這ったり、物をつかんだりするわけだ。うまく変形するように柔軟材料を成形することが、ソフトロボット作りの第一歩になる。
ソフトロボットには関節という節目がない。普通のヒューマノイドロボットであれば、足とスネと腿のパーツを関節でつなげば脚ができあがる。タコの腕(足?)は、分解できないので根元から先まで、一度に丸ごと作らなければいけない。ソフトロボットには分解と組み立てという概念が通用しないのだ。
研究者が、やわらかいロボットの体をどうやって作っているのか、いくつかの方法を紹介しよう。
キャストモールディング
ソフトロボットを作る一番ポピュラーな成形方法が、注型(cast molding)だ。中空の型に、液状のシリコーンゴムの素を注ぎ入れて、固まるまで待つ。
ハーバード大学の研究グループは、Soft Robotics Toolkitというwebサイトで、作り方を説明している。

モールディングは、チョコレートを溶かして好きな形のカップに流し入れて冷やすと、その形のチョコができるのと同じだ。ただし、ソフトロボットに使われるシリコーンゴムは、温めて溶かすのではなく、2つの液体を混ぜて化学反応を起こして固める。
金属のような硬い材料なら、塊を削って欲しい形を作ることもできるが、ゴムやスポンジなどのやわらかい材料を刃物で削るのはとても難しい。そこで、液体という形のない状態の素材を硬化させて形を作るのだ。
3Dプリンタで型を作る
注型で形を作るには型が必要だ。例えば、星型のゴムを作りたかったら、星型の穴があいた型を準備しなければいけない。
硬い材料で欲しい形を作って原型として、粘土にそれを押しつければ、凹みができ、型になる。しかし、これは原型を作るのが面倒だ。
そこで、原型をデジタルデータで作って、その型を3Dプリンタで出力するのが便利だ。まず欲しい形の3Dモデルを3DCADで設計する。次に、設計した形の空洞をもった3Dモデルを作る。欲しい形の、凹凸を反転させたものが型になるわけだ。
3Dモデル作りと、実際の造形は、どちらもそれなりに時間がかかる。
手作りソフトロボットの難しさ
ソフトロボット作りは、料理に似た難しさがある。レゴブロックであれば説明書通りに組み立てれば全く同じものができるだろう。シリコーンゴムで作るソフトロボットは、素材が不定形で化学反応も利用するから、コツを押さえないと失敗する。
例えば、シリコーンゴムはよくかき混ぜないとねちゃねちゃしていつまでも固まらない。モタモタ作業していると、シリコーンの硬化が始まってしまう。シリコーンの原液は服につくと石鹸で洗っても取れない。
混ぜているときにシリコーンの原液に泡が入って、固まった後に泡が残ってしまうこともよくある。泡を取り除くには、真空脱泡装置を使う。泡を避けるには、サラサラした粘度の低いシリコーンを使うのがよい。
シリコーン製のロボットは、中の空洞に空気を入れて膨らませて変形させるものが多い。空洞を作るために2つのパーツを接着して、その後にチューブを接着するのだが、うまくやらないと空気が漏れて動かない。
直接3Dプリンタで出力する
3Dプリンタで直接やわらかいロボットを造形できたら理想的だ。
普通の3Dプリンタは硬い材料しか使えない。だから、型を3Dプリントしてやわらかい材料を流し込むというやり方をする。最近は、3Dプリンタで使えるやわらかい材料が増えてきた。
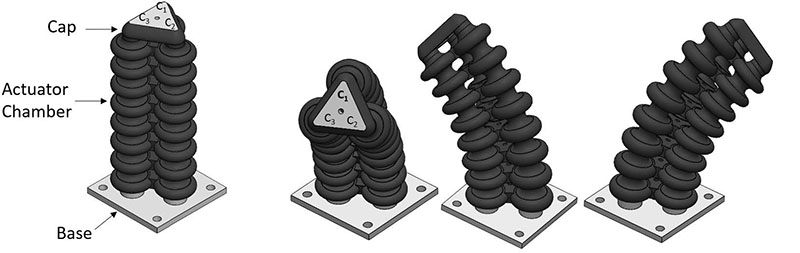
例えば、UC San DiegoのBioinspired Robotics and Design Labは、空気圧で伸縮するじゃばらを3Dプリンタで造形して、歩くロボットの脚を作った。ゴムライクなUV硬化樹脂を使えるStratasys社のObjetという高価なプリンタが使われている。
もっと安価な3Dプリンタでも、空気圧で曲がる中空構造が造形できる。シンガポール国立大学のEvolution Innovation Labでは、FDM式の3Dプリンタでソフトグリッパーやウェアラブルデバイスを試作している。

ソフトリソグラフィー
シリコーンの薄板にマイクロ流路(micro channel)を作る技術のひとつに、ソフトリソグラフィー(soft lithography)という方法がある。元はロボティクスと関係なく、化学やバイオ研究に使われるマイクロ流体デバイス(microfluidic device)のために開発された。
ソフトリソグラフィーによるマイクロ流路の典型的な作り方は、ざっくり以下の通り:紫外線硬化樹脂の感光と現像で微細な流路パターンを作る。その上にシリコーンの一種であるPDMSを薄く流して硬化させ、凹凸を写し取る。PDMSに細い溝ができた状態になるので、ガラス板をプラズマ接着して蓋をすることで流路ができる。
ハーバード大学のWhitesides Research Groupで作られたソフトロボットは、細かい流路に色水を流して、体表面の色を変えるカモフラージュ機能をもっている。この例では、流路はそんなに細かくないので3Dプリンタで流路パターンを作り、薄いシリコーンに写し取っている。

実は、ソフトリソグラフィーを最初に提案したのが、Whitesides教授の研究グループだった。Whitesides教授は化学者で、ロボット研究者ではない。目立った研究成果を上げているハーバード大学のソフトロボティクス研究の背景には、ソフトリソグラフィーから派生した空気圧回路の製作技術がある。
これから
ここまで書いたのは、シリコーンゴムを使った典型的な軟体ロボットの作り方である。今のソフトロボティクスは、シリコーンロボットができなかったことに挑戦するフェーズにある。だから、ソフトロボットの作り方はどんどんアップデートされ、多様になっていくだろう。
ロボットの形をコンピュータが設計したり、人の手を借りずにロボットが製造されたりする技術が、今後試されていくはずだ。
文責:新山龍馬(ロボット博士)
