
やわらかさ+かたさ
いままでのロボティクスは、かたい機械を前提にしていた。見すごされてきたやわらかさをもっと活用しようというのが、ソフトロボティクスの基本的な考え方だ。
かたいこと・やわらかいこと、どちらも使い道がある。全ての機械をぐにゃぐにゃの骨ぬきにしても意味がない。ソフトロボティクスが目指すのは、かたさとやわらかさの調和だ。
かたい材料とやわらかい材料を使い分けるというやり方もあるのだが、ひとつの材料が骨にも肉にもなれば便利ではないだろうか?
かたくなったりやわらかくなったりする材料を作るために利用されているのが「ジャミング(jamming)」である。
粉粒ジャミング
ジャミング(jamming)とは、混み合って詰まることである。イチゴジャム(strawberry jam)や電波妨害(radio jamming)からは遠く、交通渋滞(traffic jam)に近いイメージ。
物理学でジャミングといえば、粒子の集まりが、流体のような状態から、固体のような状態に変わるジャミング転移(jamming transition)を指す。これは、液体が凍って固体になるような相転移とも異なるおもしろい現象だ。
例えば、小麦粉を袋から出そうとしたとき、砂時計のようにサラサラと流れ出る場合もあるが、口が小さめだと詰まることがある。これがジャミングだ。他にも、さらさらの砂でも、盛って砂山を作ることができるのはジャミングによるものだ。
粉や顆粒(かりゅう)の集合で起こるジャミングを粉粒ジャミング(granular jamming)と呼ぶ。
人工的にジャミングを起こすには、やわらかくて気密性の高い袋に粉体を詰めて空気を抜く。真空パックされて粒子の隙間がなくなり、かみ合うことでかたくなる。袋に空気を戻すと、粉体は流動性を取り戻し、変形できるようになる。
iRobotの研究者らは、DARPA(アメリカ国防高等研究計画局)が助成したChemical Robots (ChemBots)プログラムの中で、ジャミング転移を使った不定形ソフトロボットを作って2009年に発表した。
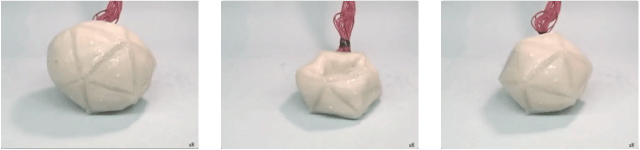
このロボットは「皮膚」をジャミングによって部分的にやわらかくしたりかたくしたりすることで、膨張したときの変形をコントロールできる。ただし、このロボットは自立で転がることはできず、外の制御装置にたくさんのチューブでつながっている。
2012年、当時MITの博士学生だったNadia Chengらは、ジャミングを使ったゾウの鼻のようなロボットアームを開発した。

ワイヤで引っ張ってアームを曲げ、固めてしまえば姿勢を保つためにエネルギーがいらない。曲がる部分と曲がらない部分、つまり関節と骨がプログラムで変えられるロボットアームとも解釈できる。
積層ジャミング
粉粒ジャミングの苦手なことは、薄い構造を作ることだ。ジャムった粉体は、塊では強いが、細くしたり薄くしたりすると弱い。
粉や粒を使わないでも、フィルムあるいはシートを積層して袋に入れ、空気を抜くと層間の摩擦が高まってジャミングが起こる。これを積層ジャミング(layer jamming)と呼ぶ。
2012年の、MITのBiomimetics Robotics LabとSamsungの共同プロジェクトでは、積層ジャミングを使ったヘビのようなロボットアームが開発された。ウロコのようなフィルムでアームを覆い、袋で包んで、空気を抜くとかたくなる。

また、2014年にMITメディアラボのTangible Media Groupは、積層ジャミングを使ってかたさが変わる板や、丸められるスツールを試作した。

繊維ジャミング
ジャミングを起こす構成要素の形態は、粉体とシートに限らない。たくさん寄り集まって、隣同士固着する小さい要素ならなんでもいいわけだ。
すぐに思いつくのは繊維だろう。繊維を構成要素としたジャミングを繊維ジャミング(fiber jamming)と呼ぶ。まだあまり研究が進んでいない技術だ。
強度が必要な樹脂部品の射出成形では、ガラス繊維やカーボン繊維を混ぜて強化することがあり、繊維の配向や流動について調べられている。
ジャミンググリッパーの行き詰まり
ジャミング転移を一躍有名にしたのは、2010年に発表されたUniversal Jamming Gripperだった。これは、DARPAのプログラムに参加したiRobot社、Creative Machines Lab、そしてシカゴ大学Jaegar Labの共同研究成果だった。
やわらかいジャミングハンドはつかみたい物の形になじみ、空気を抜くと、物を巻き込んだままかたくなる。2012年には、つかんだものを投げるデモも発表された。
この研究で博士号を取ったコーネル大学のJ. Amendらは、2012年にEmpire Roboticsを創業した。このスタートアップ企業は、ジャミンググリッパーをVERSABALL®として製品化し、キットの提供を開始した。

しかし、ソフトロボティクスの「臨機応変」という特徴は、繰り返し作業に特化した専用機械が活躍する産業界では器用貧乏とみられてしまう。2016年、継続的なビジネスが成り立つだけの顧客を獲得できなかったとして、Empire Roboticsはビジネスを閉じた。
Empire Roboticsの創業者らは、4年に渡る活動を、Soft Robotics誌に“Soft Robotics Commercialization: Jamming Grippers from Research to Product”と題する論文で発表した。企業のR&D内容が論文になることは非常に珍しい。ロボット研究から製品化までの道のりの難しさの一端が伝わってくる。
ジャミングの触り心地
ジャミング転移を試すのは意外と簡単だ。ゴム風船に、粗挽きのコーヒーを詰め、大きな注射器や掃除機などで空気を抜けばよい。風船の口には粉が出ないようにフィルタをはさむ。
ジャミングが広く知られるようになって、その応用は広がっている。例えば、jamming gripperに触発されて、2012年にはMITメディアラボのTangible Media Groupで形が変わるコンピュータインタフェースが作られた。
形を記憶したり、腕に巻きつけて固めたり、ユーザーの手になじんだり、ものの硬さを再現して伝えたり、色々な機能が広がる。
ジャミング小史
新技術のように思われるジャミング転移だが、実は、そのロボットグリッパーへの応用は1980年代には早くも知られていたようだ。しかし、忘れられ、時は過ぎた。
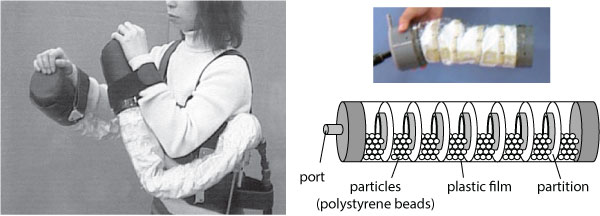
2002年に発表されたジャミングのウェアラブルデバイスへの応用は、日本発の研究である。これは、立命館大学の川村貞夫教授が率いた研究プロジェクトの中で行われた。ジャミングとは呼ばれず「粒子内蔵型機械拘束要素(PMC: Particle Mechanical Constraint)」と名付けられた機構は、発泡スチロールビーズのジャミング転移を利用していた。
新しい原理を求めて
ジャミング転移のほかにも、かたさ調節(stiffness control)の手段はいろいろある。例えば、低融点合金を融かしたり固めたりするすることや、磁界の強さで粘性が変わるMR流体(磁気粘性流体 magneto-rheological fluid))を使うなどだ。
やわらかさは動きや適応に役立ち、かたさは支えや保護に役立つ。かたさをプログラミングできる新しい機能性材料は、これからも試されていくだろう。
文責:新山龍馬(ロボット博士)
